|
C++
Example: Geometry Concepts
Line Intersection and its Applications, 2D drawing
|
| |
|
By lbackstrom
Line-Line
Intersection
Finding a Circle
From 3 Points
Reflection
Rotation
Convex Hull
In the previous section we saw how to use vectors to solve
geometry problems. Now we are going to learn how to use
some basic linear algebra to do line
intersection, and then apply line intersection
to a couple of other problems.
Line-Line
Intersection
One of the most common tucancode.nets you will find in geometry
problems is line intersection.
Despite the fact that it is so common, a lot of coders
still have trouble with it. The first question is, what
form are we given our lines in, and what form would we
like them in? Ideally, each of our lines will be in the
form Ax+By=C, where A, B and C are the numbers
which define the line. However, we are rarely given lines
in this format, but we can easily generate such an
equation from two points. Say we are given two different
points, (x1, y1) and (x2,
y2), and want to find A, B and C for the
equation above. We can do so by setting
A = y2-y1
B = x1-x2
C = A*x1+B*y1
Regardless of how the lines are specified, you should
be able to generate two different points along the line,
and then generate A, B and C. Now, lets say that you have
lines, given by the equations:
A1x + B1y = C1
A2x + B2y = C2
To find the point at which the two lines intersect,
we simply need to solve the two equations for the two
unknowns, x and y.
double det = A1*B2 - A2*B1
if(det == 0){
//Lines are parallel
}else{
double x = (B2*C1 - B1*C2)/det
double y = (A1*C2 - A2*C1)/det
}
To see where
this comes from, consider multiplying the top equation by
B2, and the bottom equation by B1.
This gives you
A1B2x + B1B2y
= B2C1
A2B1x + B1B2y
= B1C2
Now, subtract the bottom equation from the top
equation to get
A1B2x - A2B1x
= B2C1 - B1C2
Finally, divide both sides by A1B2
- A2B1, and you get the
equation for x. The equation for y can be derived
similarly.
This gives you the location of the intersection of two
lines, but what if you have line segments, not lines. In
this case, you need to make sure that the point you found
is on both of the line segments. If your line segment goes
from (x1,y1) to (x2,y2),
then to check if (x,y) is on that segment, you just need
to check that min(x1,x2) ≤
x ≤ max(x1,x2), and do
the same thing for y. You must be careful about double
precision issues though. If your point is right on the
edge of the segment, or if the segment is horizontal or
vertical, a simple comparison might be problematic. In
these cases, you can either do your comparisons with some
tolerance, or else use a fraction class.
Finding a Circle
From 3 Points
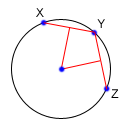
Given 3 points which
are not colinear (all on the same line) those three points
uniquely define a circle. But, how do you find the center
and radius of that circle? This tucancode.net turns out to be a
simple application of line intersection. We want to find
the perpendicular bisectors of XY and YZ, and then find
the intersection of those two bisectors. This gives us the
center of the circle.
To find the
perpendicular bisector of XY, find the line from X to Y,
in the form Ax+By=C. A line perpendicular to this
line will be given by the equation -Bx+Ay=D, for
some D. To find D for the particular line we are
interested in, find the midpoint between X and Y by taking
the midpoint of the x and y components independently.
Then, substitute those values into the equation to find D.
If we do the same thing for Y and Z, we end up with two
equations for two lines, and we can find their
intersections as described above.
Reflection
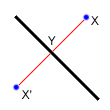
Reflecting a point across a line requires the same
techniques as finding a circle
from 3 points. First, notice that the distance
from X to the line of reflection is the same as the
distance from X' to the line of reflection. Also note that
the line between X and X' is perpendicular to the line of
reflection. Now, if the line of reflection is given as Ax+By=C,
then we already know how to find a line perpendicular to
it: -Bx+Ay=D. To find D, we simply plug in the
coordinates for X. Now, we can find the intersection of
the two lines at Y, and then find X' = Y - (X - Y).
Rotation
Rotation doesn't really fit in with line intersection, but
I felt that it would be good to group it with reflection.
In fact, another way to find the reflected point is to
rotate the original point 180 degrees about Y.
Imagine that we want to rotate
one point around
another, counterclockwise by θ degrees. For
simplicity, lets assume that we are rotating about the
origin. In this case, we can find that x' = x Cos(θ)
- y Sin(θ) and y' = x Sin(θ) + y Cos(θ).
If we are rotating about a point other than the origin, we
can account for this by shifting our coordinate system so
that the origin is at the point of rotation, doing the
rotation with the above formulas, and then shifting the
coordinate system back to where it started.
Convex
Hull
A convex hull of a set of points is the smallest convex
polygon that contains every one of the points. It is
defined by a subset of all the points in the original set.
One way to think about a convex hull is to imagine that
each of the points is a peg sticking up out of a board.
Take a rubber band and stretch it around all of the
points. The polygon formed by the rubber band is a convex
hull. There are many different algorithms that can be used
to find the convex hull of a set of points. In this
article, I'm just going to describe one of them, which is
fast enough for most purposes, but is quite slow compared
to some of the other algorithms.
First, loop
through all of your points and find the leftmost point. If
there is a tie, pick the highest point. You know for
certain that this point will be on the convex hull, so
we'll start with it. From here, we are going to move
clockwise around the edge of the hull, picking the points
on the hull, one at a time. Eventually, we will get back
to the start point. In order to find the next point around
the hull, we will make use of cross products. First, we
will pick an unused point, and set the next point, N, to
that point. Next, we will iterate through each unused
points, X, and if (X-P) x (N-P) (where P is the
previous point) is negative, we will set N to X. After we
have iterated through each point, we will end up with the
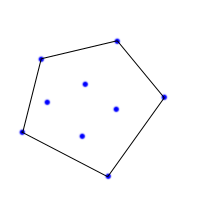
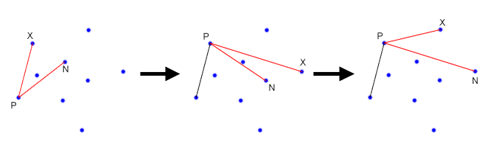
next point on the convex hull. See the diagram below for
an illustration of how the algorithm works. We start with
P as the leftmost point. Now, say that we have N and X as
shown in the leftmost frame. In this case the cross
product will be negative, so we will set N = X, and there
will be no other unused points that make the cross product
negative, and hence we will advance, setting P = N. Now,
in the next frame, we will end up setting N = X again,
since the cross product here will be negative. However, we
aren't done yet because there is still another point that
will make the cross product negative, as shown in the
final frame.
The basic
idea here is that we are using the cross product to find
the point which is furthest counterclockwise from our
current position at P. While this may seem fairly
straightforward, it becomes a little bit tricky when
dealing with colinear points. If you have no colinear
points on the hull, then the code is very straightforward.
convexHull(point[] X){
int N = lengthof(X);
int p = 0;
//First find the leftmost point
for(int i = 1; i<N; i++){
if(X[i] < X[p])
p = i;
}
int start = p;
do{
int n = -1;
for(int i = 0; i<N; i++){
//Don't go back to the same point you came from
if(i == p)continue;
//If there is no N yet, set it to i
if(n == -1)n = i;
int cross = (X[i] - X[p]) x (X[n] - X[p]);
if(cross < 0){
//As described above, set N=X
n = i;
}
}
p = n;
}while(start!=p);
}
Once we start
to deal with colinear points, things get trickier. Right
away we have to change our method signature to take a
boolean specifying whether to include all of the colinear
points, or only the necessary ones.
//If onEdge is true, use as many points as possible for
//the convex hull, otherwise as few as possible.
convexHull(point[] X, boolean onEdge){
int N = lengthof(X);
int p = 0;
boolean[] used = new boolean[N];
//First find the leftmost point
for(int i = 1; i<N; i++){
if(X[i] < X[p])
p = i;
}
int start = p;
do{
int n = -1;
int dist = onEdge?INF:0;
for(int i = 0; i<N; i++){
//X[i] is the X in the discussion
//Don't go back to the same point you came from
if(i==p)continue;
//Don't go to a visited point
if(used[i])continue;
//If there is no N yet, set it to X
if(n == -1)n = i;
int cross = (X[i] - X[p]) x (X[n] - X[p]);
//d is the distance from P to X
int d = (X[i] - X[p]) ⋅ (X[i] - X[p]);
if(cross < 0){
//As described above, set N=X
n = i;
dist = d;
}else if(cross == 0){
//In this case, both N and X are in the
//same direction. If onEdge is true, pick the
//closest one, otherwise pick the farthest one.
if(onEdge && d < dist){
dist = d;
n = i;
}else if(!onEdge && d > dist){
dist = d;
n = i;
}
}
}
p = n;
used[p] = true;
}while(start!=p);
}
|